




通过控制周期25µs/5轴*1这种超高速伺服周期运算,实现高精度的指令运算和高精度的指令追踪,使客户的设备达到更高精度。
*1.仅电机控制的情况。2022年11月本公司调查结果
运动控制器 CK系列
高速控制周期实现更高精度的加工通过控制周期25µs/5轴*1这种超高速伺服周期运算,实现高精度的指令运算和高精度的指令追踪,使客户的设备达到更高精度.
【Rapid】高速控制周期实现更高精度的加工
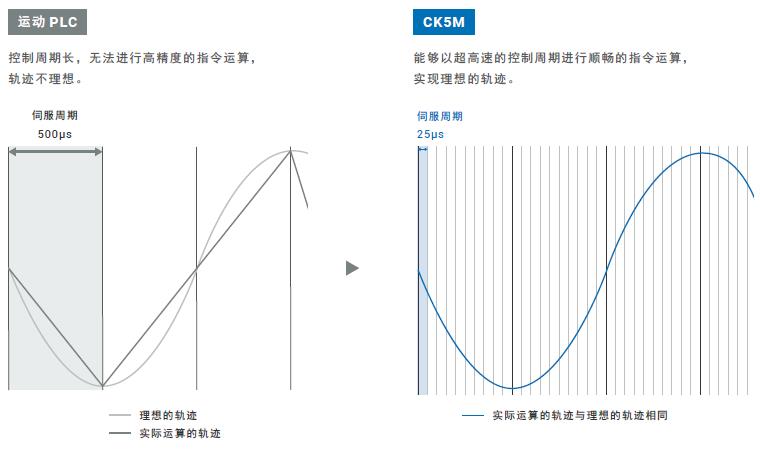
高速的指令运算,实现高精度加工
实现高精度的加工,高精度的指令不可或缺。
CK3M/CK5M系列能以超高速的控制周期进行高精度的指令运算。
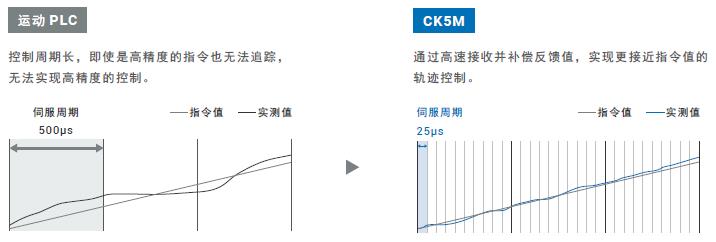
高速补偿追踪指令值,实现高精度的加工
只要存在高精度的指令,即可通过追踪指令,实现高精度的运动控制。
CK3M/CK5M系列能够以高速的控制周期运行执行器,实现高精度的轨迹控制。
【Flexible】支持多供应商实现理想设备构成
通过支持多供应商执行器/标尺的接口和控制模式,可以摆脱外围设备的限制,使客户的设备达到更高性能。
支持不同接口,实现理想设备构成
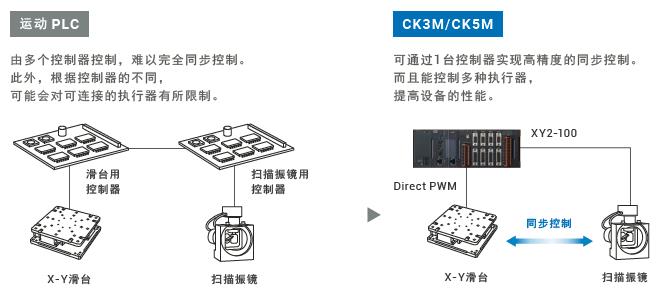
输入接口支持A/B相信号、正弦波信号、串行数据I/F,而控制指令接口也支持模拟指令(DAC)、基于Direct PWM*2的轴控制。该系统可连接高精度的标尺、精密的直线电机、高精度的扫描振镜等,能自由选择适合客户应用的设备构成。还能通过各执行器之间的高精度同步控制实现高精度的加工。
*2.这是Power PMAC和伺服放大器的通信方式,是本公司的特色。
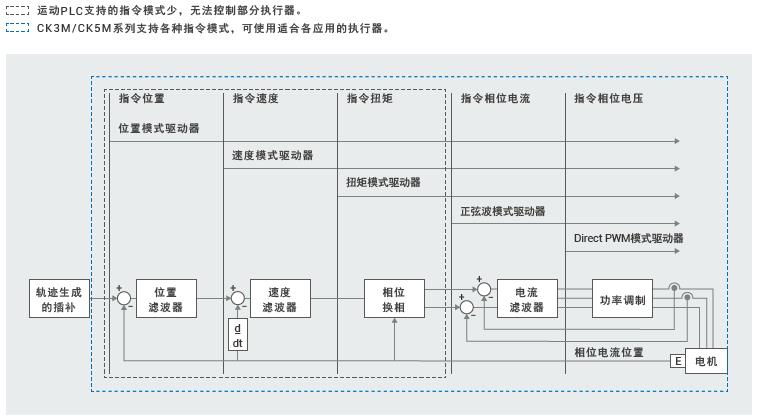
不同控制模式,实现理想设备构成
不仅是硬件,软件结构也支持位置、速度、扭矩、正弦波及Direct PWM模式等多种控制电机的模式。以适合客户应用的控制模式实现高速高精度的控制。
【Capable】高自由度的开发实现各种各样的应用
内置PMAC架构可进行高自由度的开发,通过高自由度的软件结构轻松构建客户自有算法,并实现以往难以实现的应用。
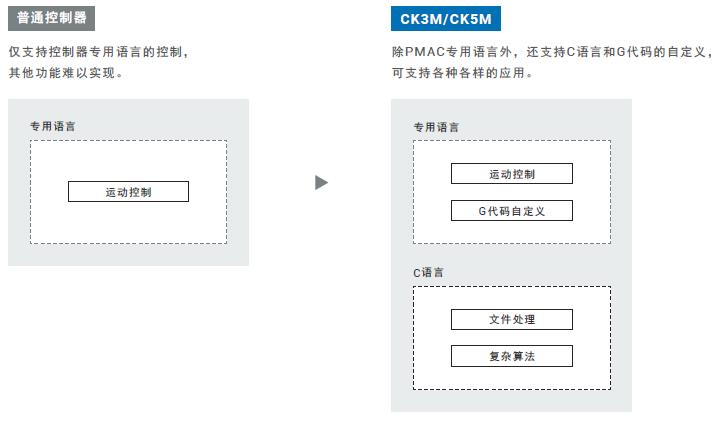
使用多种编程语言,实现各种各样的应用
CK3M/CK5M系列使用PMAC专用脚本语言,可对客户自有的复杂、高级算法进行编程。还支持C语言,可轻松实现非常复杂的算法和处理控制器内的日志文件等普通控制器难以实现的功能。此外,通过定义子程序,不仅可以自定义标准G代码,还能实现具有客户专属功能的G代码。
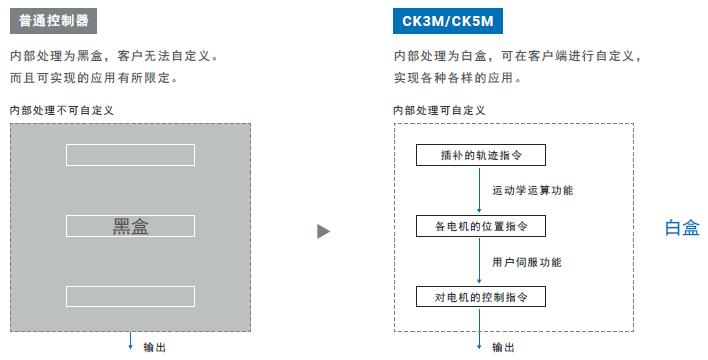
开放的软件结构,实现各种各样的应用
通过自定义加工数据坐标系和执行器机械坐标系的关系,可以轻松实现需要复杂执行器机构的应用(例如:机器人机构和On the Fly激光加工等)。
【Easy】系统整合实现设备设计工时的削减
搭载EtherCAT ®I/F、EtherNet/IP™功能。整个系统,包含外围设备,可以通过1台控制器进行控制,编程和通信设置可以整合为一个工具,从而削减设备的设计工时。
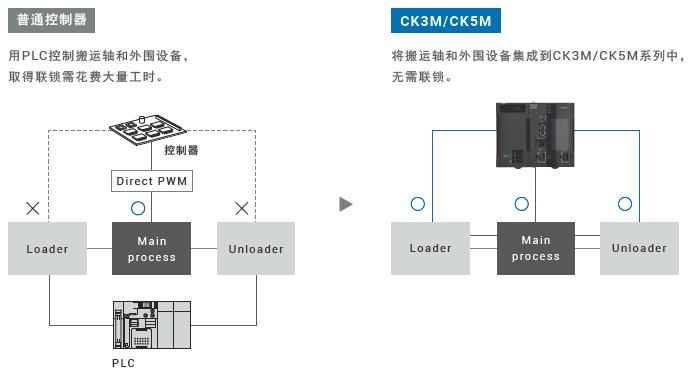
无需联锁,减少设计工时
搭载EtherCAT I/F、EtherNet/IP功能,不只是加工执行器,还将搬运轴和外围设备集成到1台控制器上,因此无需联锁,可减少设备设计所需时间。
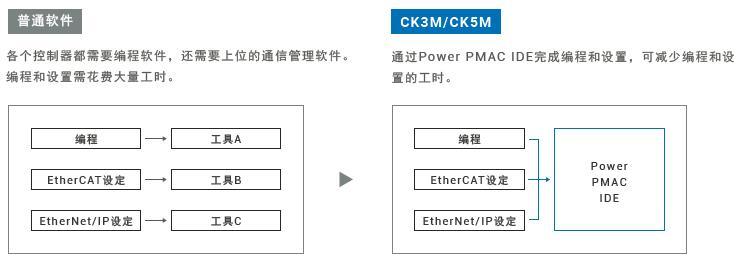
整合工具,轻松设置
将编程和通信设置整合到软件集成开发环境(Power PMAC IDE)中,可进一步减少设计工时。
| 产品名称 | 存储器容量 | 端口 | EtherCAT端口的最多控制轴数 | 型号 |
|---|---|---|---|---|
| CK3M CPU单元*1 | RAM:1GB 内置闪存:1GB CPU:Dual core 1GHz | EtherNet/IP:1 port EtherCAT:无 | - | CK3M-CPU101 |
| EtherNet/IP:1 port EtherCAT:1 port(DC sync) | 4轴 | CK3M-CPU111 | ||
| EtherNet/IP:1 port EtherCAT:1 port(DC sync) | 8轴 | CK3M-CPU121 | ||
| CK5M CPU单元*1 | RAM:2GB 内置闪存:4GB CPU:Quad core 1.6GHz | EtherNet/IP:1 port(1Gbps) EtherCAT:1 port(DC sync) | 16轴 | CK5M-CPU131 New |
| EtherNet/IP:1 port(1Gbps) EtherCAT:1 port(DC sync) | 32轴 | CK5M-CPU141 New |
性能规格
性能规格如下所示。
*1. 环型拓扑可用于CPU单元的PMAC固件版本2.7.0以上。
*2. EtherNet/IP通信时,请务必使用屏蔽电缆。以1Gbps进行通信时,请务必使用类别5e以上的电缆。
*3. EtherNet/IP仅支持目标端,不可作为始发端使用。EtherNet/IP仅限CPU单元的PMAC固件版本Ver.2.6.0以上且2020年9月8日及以后生产的产品(批号08920及以后)可以使用。请使用Ver.4.4.1或更高版本的Power PMAC IDE。
*4. 代表Packet Per Second,表示1秒内可处理的收发信息包数。